Speeding up pvfactors¶
This post is an example of identifying bottlenecks in numerical python code and benchmarking possible alternatives. Specifically, it shows some of the timings I did for the SunPower/pvfactors#140 pull request to the pvfactors bifacial PV simulation package.
The function of interest is pvfactors.engine.PVEngine.run_full_mode, which (as of pvfactors version 1.5.2) doesn’t run as fast as I’d like it to run, especially for large simulations (many PV rows and many timestamps).
Identifying the bottlenecks¶
There’s a lot going on under the hood in run_full_mode, so let’s start by using pyinstrument to figure out what parts of the code are taking up the most time.
import warnings
warnings.filterwarnings('ignore', message='Setting custom attributes')
warnings.filterwarnings('ignore', message='invalid value')
warnings.filterwarnings('ignore', message='divide by zero')
import pandas as pd
import numpy as np
from scipy.sparse import csc_matrix, csr_matrix
import scipy
import matplotlib.pyplot as plt
import time
import pvlib
from pvfactors.engine import PVEngine
from pvfactors.geometry import OrderedPVArray
from pyinstrument import Profiler
def make_engine():
times = pd.date_range('2019-06-01 08:00', periods=500, freq='1min', tz='Etc/GMT+5')
location = pvlib.location.Location(40, -80)
solpos = location.get_solarposition(times)
irrad = location.get_clearsky(times)
dniet = pvlib.irradiance.get_extra_radiation(times)
sat = pvlib.tracking.singleaxis(solpos.zenith, solpos.azimuth, gcr=0.5, backtrack=True)
axis_azimuth = 180
n_pvrows = 11
index_observed_pvrow = n_pvrows//2
fit_kwargs = dict(solar_zenith=solpos.zenith, solar_azimuth=solpos.azimuth,
surface_tilt=sat.surface_tilt, surface_azimuth=sat.surface_azimuth,
timestamps=times, DNI=irrad.dni, DHI=irrad.dhi, albedo=0.2)
pvarray_parameters = {
'n_pvrows': n_pvrows,
'axis_azimuth': 180,
'pvrow_height': 3,
'pvrow_width': 4,
'gcr': 0.5
}
pvarray = OrderedPVArray.init_from_dict(pvarray_parameters)
eng = PVEngine(pvarray)
eng.fit(**fit_kwargs)
return eng
engine = make_engine()
profiler = Profiler()
profiler.start()
engine.run_full_mode()
profiler.stop()
profiler.print(show_all=True)
_ ._ __/__ _ _ _ _ _/_ Recorded: 11:36:25 Samples: 3674
/_//_/// /_\ / //_// / //_'/ // Duration: 7.835 CPU time: 16.020
/ _/ v4.1.1
Program: /home/kevin/anaconda3/lib/python3.7/site-packages/ipykernel_launcher.py -f /home/kevin/.local/share/jupyter/runtime/kernel-2a6aef99-d520-43ed-8223-742e139e8e85.json
7.835 run_code IPython/core/interactiveshell.py:3288
└─ 7.835 <module> <ipython-input-4-07b716f7020c>:5
└─ 7.830 run_full_mode pvfactors/engine.py:177
├─ 3.330 build_ts_vf_matrix pvfactors/viewfactors/calculator.py:69
│ └─ 3.281 vf_pvrow_gnd_surf pvfactors/viewfactors/vfmethods.py:14
│ ├─ 2.939 vf_pvrow_surf_to_gnd_surf_obstruction_hottel pvfactors/viewfactors/vfmethods.py:105
│ │ ├─ 2.400 _vf_hottel_gnd_surf pvfactors/viewfactors/vfmethods.py:473
│ │ │ ├─ 2.286 _hottel_string_length pvfactors/viewfactors/vfmethods.py:537
│ │ │ │ ├─ 1.242 _angle_with_x_axis pvfactors/viewfactors/vfmethods.py:631
│ │ │ │ ├─ 0.792 _distance pvfactors/viewfactors/vfmethods.py:613
│ │ │ │ ├─ 0.136 [self]
│ │ │ │ └─ 0.116 where <__array_function__ internals>:2
│ │ │ │ └─ 0.089 implement_array_function <built-in>:0
│ │ │ └─ 0.081 [self]
│ │ ├─ 0.170 [self]
│ │ ├─ 0.080 lowest_point pvfactors/geometry/timeseries.py:240
│ │ └─ 0.079 lowest_point pvfactors/geometry/timeseries.py:329
│ └─ 0.284 is_empty pvfactors/geometry/timeseries.py:252
│ ├─ 0.179 nansum <__array_function__ internals>:2
│ │ └─ 0.164 nansum numpy/lib/nanfunctions.py:557
│ │ └─ 0.091 _replace_nan numpy/lib/nanfunctions.py:68
│ └─ 0.085 length pvfactors/geometry/timeseries.py:230
│ └─ 0.082 length pvfactors/geometry/timeseries.py:302
├─ 2.717 inv <__array_function__ internals>:2
│ └─ 2.717 inv numpy/linalg/linalg.py:476
├─ 0.568 build_ts_vf_aoi_matrix pvfactors/viewfactors/calculator.py:116
├─ 0.508 [self]
├─ 0.234 einsum <__array_function__ internals>:2
│ └─ 0.234 einsum numpy/core/einsumfunc.py:997
│ └─ 0.234 c_einsum <built-in>:0
├─ 0.198 get_full_ts_modeling_vectors pvfactors/irradiance/models.py:785
│ └─ 0.185 get_ts_modeling_vectors pvfactors/irradiance/base.py:49
│ └─ 0.129 __iadd__ pandas/core/generic.py:11330
│ └─ 0.128 _inplace_method pandas/core/generic.py:11304
│ └─ 0.121 new_method pandas/core/ops/common.py:50
│ └─ 0.114 __add__ pandas/core/arraylike.py:87
│ └─ 0.114 _arith_method pandas/core/series.py:4992
├─ 0.191 get_summed_components pvfactors/irradiance/base.py:94
│ └─ 0.131 __iadd__ pandas/core/generic.py:11330
│ └─ 0.129 _inplace_method pandas/core/generic.py:11304
│ └─ 0.120 new_method pandas/core/ops/common.py:50
│ └─ 0.115 __add__ pandas/core/arraylike.py:87
│ └─ 0.115 _arith_method pandas/core/series.py:4992
└─ 0.084 tile <__array_function__ internals>:2
└─ 0.084 tile numpy/lib/shape_base.py:1171
└─ 0.084 ndarray.repeat <built-in>:0
So right off the bat, we know that the vf_pvrow_gnd_surf, inv, and build_ts_vf_aoi_matrix steps are the main culprits. I plan to look at speeding up the two viewfactor calculations as well, but for today we’ll just focus on inv.
Benchmarking Alternatives¶
Despite being mathematically convenient, using explicit matrix inversion to solve a linear system is notoriously inefficient. If you were to solve a linear system by hand, you wouldn’t invert the matrix, you’d probably do something like Gaussian elimination. Humans and computers are obviously apples and oranges, but in this case it turns out to not be a bad analogy: LU decomposition with substitution is not so different from Gaussian elimination and is a common numerical approach to solving linear systems. Indeed DGESV (Double-precision General matrix SolVe, the LAPACK routine np.linalg.solve calls under the hood, for double-precision floats anyway) uses LU decomposition. So switching from explicit inversion to a decomposition-based solver may be a tasty low-hanging fruit.
Another thing I noticed is that, especially for large simulations, the system being solved tends to be quite sparse (often >90% zeros). In that case using a dense solver like DGESV is silly and a sparse solver may be an improvement. Scipy has some sparse solvers, but as of this writing they are 2-D only, so an irksome in-python iteration over the third dimension is necessary here. In the future hopefully they will be made N-D (ref). A complication is that scipy provides several sparse matrix formats; it’s not obvious to me which one will perform best here, so we’ll try a couple. It’s also worth pointing out that non-scipy sparse solvers exist, e.g. sparse, but I’ve not investigated them here.
For fun, the below code also tries out a sparse explicit inversion.
def inv_einsum(a_mat, irradiance_mat):
# the approach used in pvfactors 1.5.2
inv_a_mat = np.linalg.inv(a_mat)
q0 = np.einsum('ijk,ki->ji', inv_a_mat, irradiance_mat)
return q0
def solve(a_mat, irradiance_mat):
# using LAPACK's (actually, OpenBLAS in this case) DGESV routine
q0 = np.linalg.solve(a_mat, irradiance_mat.T).T
return q0
# helper functions to make it easy to try the same approach w/ different sparse matrix classes
def make_scipy_sparse_inv(sparse_matrix_class):
# sparse inv + einsum
def inv_einsum(a_mat, irradiance_mat):
inv_as = []
for a_mat_2d in a_mat:
a_sparse = sparse_matrix_class(a_mat_2d)
inv_a = scipy.sparse.linalg.inv(a_sparse).toarray()
inv_as.append(inv_a)
inv_a_mat = np.stack(inv_as)
q0 = np.einsum('ijk,ki->ji', inv_a_mat, irradiance_mat)
return q0
inv_einsum.__name__ = "sparse_inv_einsum_" + sparse_matrix_class.__name__
return inv_einsum
def make_sparse_solver(sparse_matrix_class):
# sparse linear solve
def spsolve(a_mat, irradiance_mat):
q0s = []
for a_mat_2d, irradiance_1d in zip(a_mat, irradiance_mat.T):
a_sparse = sparse_matrix_class(a_mat_2d)
irradiance_sparse = sparse_matrix_class(irradiance_1d).T
q0 = scipy.sparse.linalg.spsolve(a_sparse, irradiance_sparse)
q0s.append(q0)
q0 = np.stack(q0s).T
return q0
spsolve.__name__ = "spsolve_" + sparse_matrix_class.__name__
return spsolve
scipy_csc_matrix_inv = make_scipy_sparse_inv(csc_matrix)
scipy_csr_matrix_inv = make_scipy_sparse_inv(csr_matrix)
scipy_csc_matrix_spsolve = make_sparse_solver(csc_matrix)
scipy_csr_matrix_spsolve = make_sparse_solver(csr_matrix)
functions = [inv_einsum, solve,
scipy_csc_matrix_inv, scipy_csr_matrix_inv,
scipy_csc_matrix_spsolve, scipy_csr_matrix_spsolve]
Normally I’d just make up some dummy data for testing purposes, but since in this case we’re trying to tailor the code to match the specific sparseness characteristics of real pvfactors simulations, I’ve dumped a system from a real simulation to disk to use here.
import pickle
# matrices extracted from a simulation with n_pvrows=11 and 500 timestamps
with open('a_mat', 'rb') as f:
a_mat = pickle.load(f)
with open('irradiance_mat', 'rb') as f:
irradiance_mat = pickle.load(f)
irradiance_mat[np.isnan(irradiance_mat)] = 0
print(a_mat.shape, irradiance_mat.shape)
# show sparseness:
print(np.mean(a_mat==0), np.mean(irradiance_mat==0))
(500, 321, 321) (321, 500)
0.9773401073359148 0.44277258566978195
First things first, let’s make sure the alternatives give the right answer:
q0 = inv_einsum(a_mat, irradiance_mat)
data = []
for function in functions:
print(function.__name__)
%time q0_test = function(a_mat, irradiance_mat)
data.append({
'function': function.__name__,
'max abs error': np.nanmax(np.abs(q0_test - q0)),
'nan equal': np.all(np.isnan(q0) == np.isnan(q0_test))
})
print()
pd.DataFrame(data)
inv_einsum
CPU times: user 8.57 s, sys: 2.26 s, total: 10.8 s
Wall time: 2.75 s
solve
CPU times: user 2.5 s, sys: 1.67 s, total: 4.17 s
Wall time: 1.07 s
sparse_inv_einsum_csc_matrix
CPU times: user 47.7 s, sys: 331 ms, total: 48.1 s
Wall time: 47.8 s
sparse_inv_einsum_csr_matrix
/home/kevin/anaconda3/lib/python3.7/site-packages/scipy/sparse/linalg/dsolve/linsolve.py:318: SparseEfficiencyWarning: splu requires CSC matrix format
warn('splu requires CSC matrix format', SparseEfficiencyWarning)
/home/kevin/anaconda3/lib/python3.7/site-packages/scipy/sparse/linalg/dsolve/linsolve.py:216: SparseEfficiencyWarning: spsolve is more efficient when sparse b is in the CSC matrix format
'is in the CSC matrix format', SparseEfficiencyWarning)
CPU times: user 47.8 s, sys: 20.9 ms, total: 47.8 s
Wall time: 47.8 s
spsolve_csc_matrix
CPU times: user 1.02 s, sys: 11.8 ms, total: 1.03 s
Wall time: 1.03 s
spsolve_csr_matrix
CPU times: user 1.17 s, sys: 143 µs, total: 1.17 s
Wall time: 1.17 s
| function | max abs error | nan equal | |
|---|---|---|---|
| 0 | inv_einsum | 0.000000e+00 | True |
| 1 | solve | 8.526513e-14 | True |
| 2 | sparse_inv_einsum_csc_matrix | 1.136868e-13 | True |
| 3 | sparse_inv_einsum_csr_matrix | 1.136868e-13 | True |
| 4 | spsolve_csc_matrix | 1.136868e-13 | True |
| 5 | spsolve_csr_matrix | 1.278977e-13 | True |
So they all give the right answer. But looking at the basic %time outputs above, the two sparse inversion functions are very slow, so there’s no point in including them in the more rigorous timing comparison below.
timings = {}
# don't include the slow-as-molasses sparse inversion functions
for function in [inv_einsum, solve, scipy_csc_matrix_spsolve, scipy_csr_matrix_spsolve]:
funcname = function.__name__
timings[funcname] = []
for _ in range(10):
st = time.perf_counter()
_ = function(a_mat, irradiance_mat)
ed = time.perf_counter()
timings[funcname].append(ed - st)
timings = pd.DataFrame(timings)
timings.boxplot(showfliers=False)
plt.ylim(bottom=0)
plt.ylabel('Elapsed time [s]')
Text(0, 0.5, 'Elapsed time [s]')
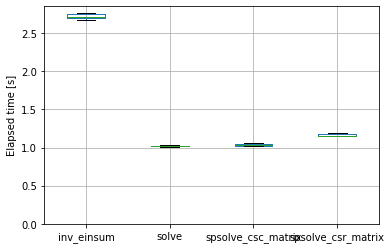
timings.median()
inv_einsum 2.714173
solve 1.020124
spsolve_csc_matrix 1.027375
spsolve_csr_matrix 1.157869
dtype: float64
timings.median() / timings['inv_einsum'].median()
inv_einsum 1.000000
solve 0.375851
spsolve_csc_matrix 0.378522
spsolve_csr_matrix 0.426601
dtype: float64
So dense and sparse solvers are indeed significantly faster than explicit inversion (for this problem, on this machine, with these package versions, etc etc). An interesting note is that dense and sparse solvers perform more or less equally here; on another machine with a newer CPU (and newer scipy version) the sparse solver outperformed the dense solver.